工業製造業は経済社会の発展を促進する上で重要な役割を果たしています。現在、自動溶接装置の研究は深化・具体化しており、様々な溶接構造物の製造に広く利用されています。
自動溶接プロセスでは、溶接接合ギャップ誤差をインテリジェントかつデジタル的にある程度合理的に制御し、これに基づいてワークピースの位置ずれ、ワークピース接合部のずれなどの要因も考慮する必要があります。そのため、レーザー溶接シームトラッキング技術は溶接プロセスにおいて重要な役割を果たします。
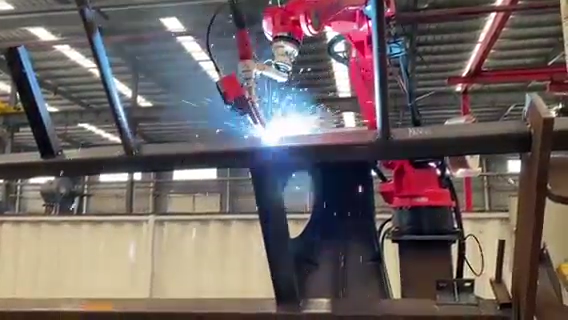
セメントタンク車の車体ベースの溶接 レーザー溶接による7軸地球軌道8軸回転
-ワークピースの位置は大きく変化する
-ワークピースの接続部に偏差がある
-高い溶接精度が求められる
-溶接環境が悪く煙が多い
この場合、柔軟性、安定性、信頼性に優れたレーザー溶接シーム追跡システムを備えた溶接に、Yooheart インテリジェント ロボット HY1006A-145 が使用されます。
各溶接の前に、装置はまず溶接シーム位置検出装置によって溶接シームの座標をスキャンして記録し、次に内部アルゴリズムによって座標オフセットを計算し、参照座標パラメータを実際の時間に入力して実際の時間偏差を補正し、溶接後の製品の密閉性と完全性を確保します。
「4点交点法」
周知のとおり、2 点は直線を決定しますが、ワークピースの組み立てによって角度が形成され、従来のアルゴリズムではその位置を決定できません。そのため、4 時の「交差」法を使用する必要があります。交差する 2 つの線は交点を生成します。この特殊なアルゴリズムでは、既知の 4 点の座標を決定することで交点の座標の位置を計算し、溶接の目的を達成します。

レーザーシームトラッキングシステム
レーザー溶接シームトラッキングシステムは、主にレーザーセンサーと監視端末で構成されています。レーザーセンサーは、溶接シーム情報を能動的に取得し、リアルタイムで処理するとともに、産業用ロボットとのリアルタイム通信を維持します。監視端末は、センサーの監視と設定を行います。また、溶接前の位置特定、追跡、スキャン機能も備えており、インテリジェント溶接のニーズに対応します。
動作原理:溶接継ぎ目をスキャンし、点群画像をフィッティングし、アルゴリズムで特徴点を正確に識別し、計算結果のリアルタイムデータをロボットに送信して制御命令に変換し、ロボットの動作を変更またはガイドします。
波形板ソリューション

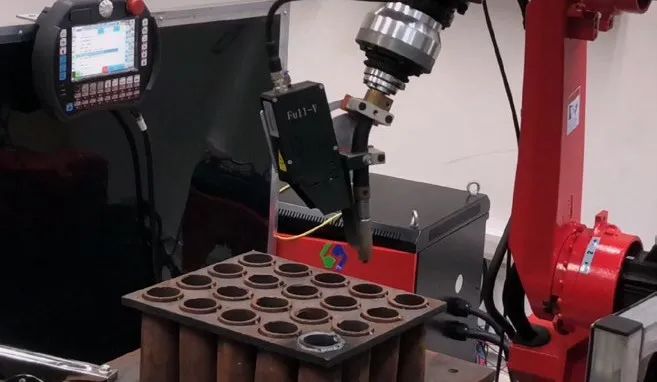
丸穴自動プラグ溶接ソリューション

円形シームソリューション

チューブプレートソリューション
Yunhua Intelligent は、迅速な導入、安全で効率的な自動化ソリューション、およびリアルタイムのシステムソリューションを提供できます。レーザービジョン溶接シーム追跡システムにより、溶接ロボットはリアルタイムの溶接シームの位置特定と追跡を実現し、溶接プロセス中の溶接シームのオフセットに応じて溶接軌道を修正できるため、真のインテリジェント溶接が実現します。
投稿日時: 2022年4月9日



