ロボット溶接の溶接効果は様々な側面から影響を受けます。多くのお客様は、溶接ロボットの使用に慣れるまでに、多かれ少なかれ何らかの問題に遭遇します。基本的に、これらの問題は不適切な操作やロボットの設定に起因しており、適切な調整を行うことで解決できます。次に、Yunhua溶接ロボットと関連ソリューションの使用中によく発生するいくつかの問題について、エディターが詳しく解説します。
1. 溶接中にアークが始動しない
1. 物語はまだ始まっていない
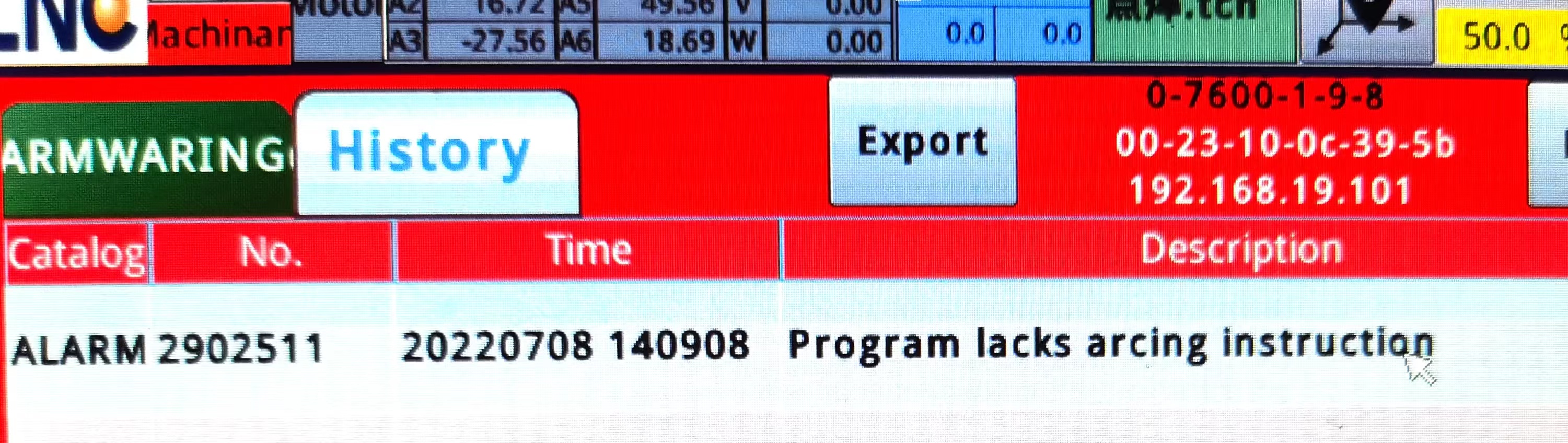
理由: 編集されたプログラムで円弧終了コマンドを実行する前に対応する円弧開始コマンドがありません
処理方法: 円弧終了コマンドを1つ追加するか、円弧開始コマンドを1つ減らすかを確認します。
2. アーク始動に失敗しました、信号検出が間違っています
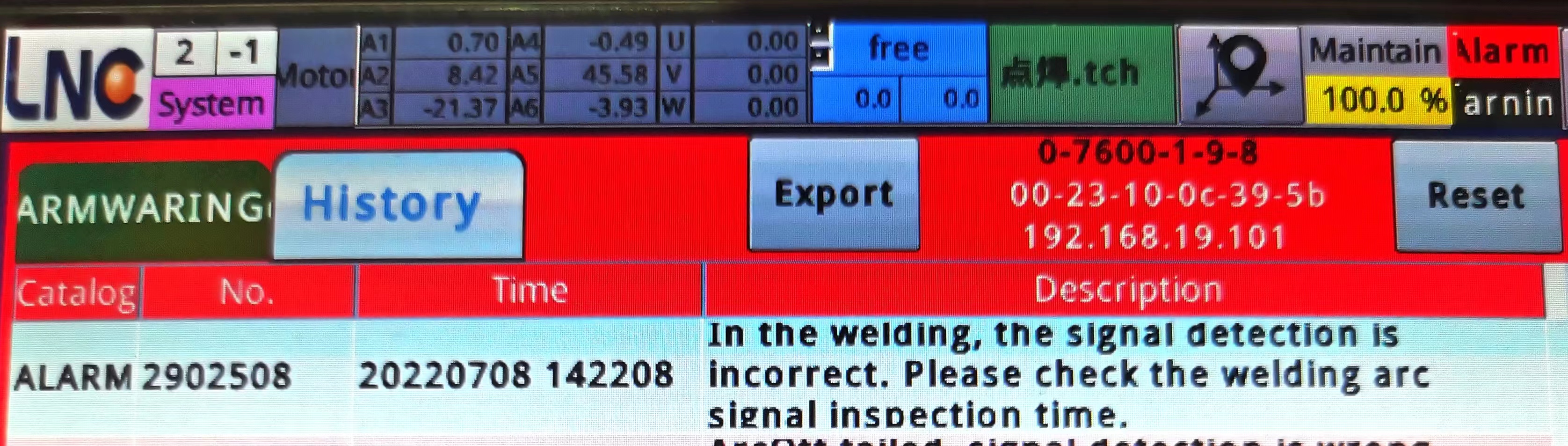
アプローチ:
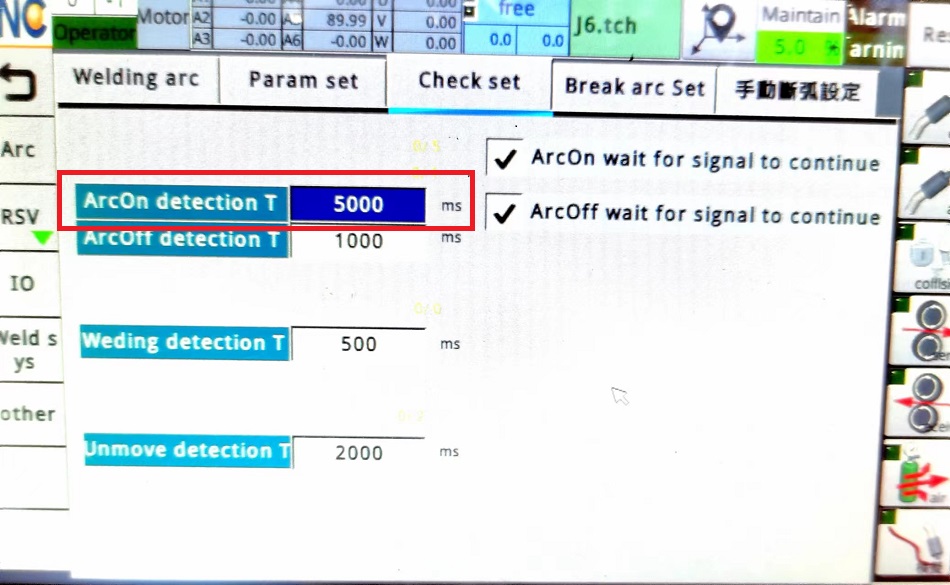
1) パラメータページで溶接中断時間の設定を確認してください。通常は5000msに設定するのが適切です。
2) 溶接機の信号がシステムに正常に送信されているかどうかを確認します。
3) ワークピースが接地されているか確認する
3. アーク放電によるワイヤーの焼損
理由:
1) 電流と電圧の不一致
加工方法:実際のワークの厚さと溶接機に応じて適切な電流と電圧を設定する必要があります。
2) 溶接ワイヤの長さが長すぎる
処理方法:一般的に、溶接ワイヤの長さは溶接ワイヤの直径の10〜15倍であり、溶接ワイヤの直径に応じて適切な溶接ワイヤの長さが選択されます。

電流が少なすぎると溶接が不均一になる

正常な電流と電圧、美しくしっかりとした溶接

溶接トーチの端がワイヤーをボール状にする

通常の溶接後、溶接トーチのエンドワイヤは良好な状態です
4. アーク放電後に自動消弧現象が発生する
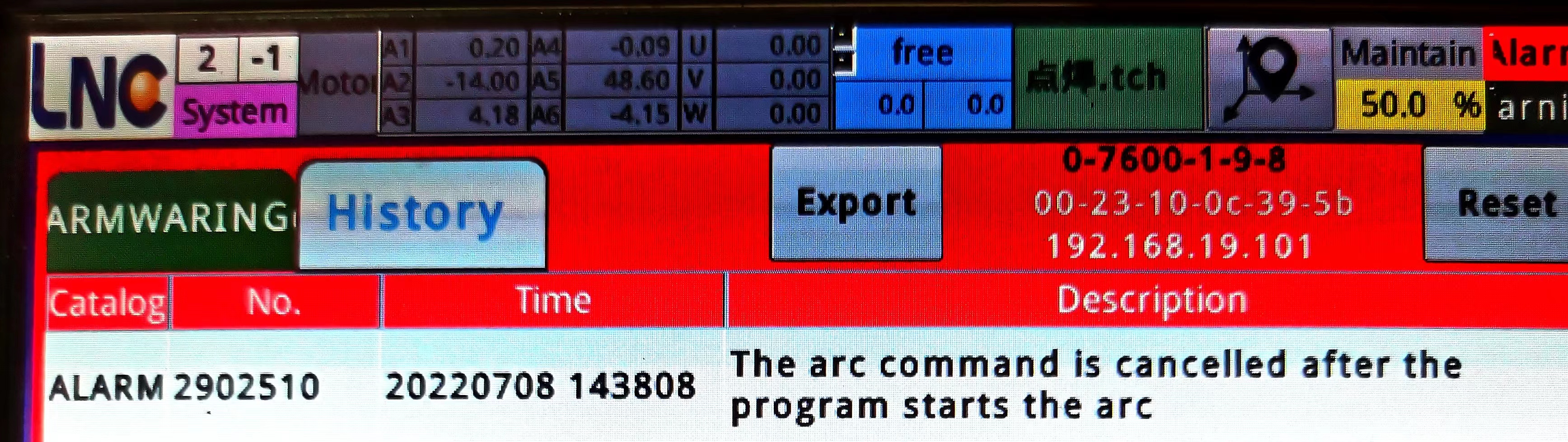
解決方法:パラメータの非移動時間設定に問題がないか確認し、溶接トーチが移動したかどうかを確認します。
2. 溶接中にアークが切れる
理由:
1.溶接ワイヤがワークピースに接触しない場合、アーク遮断アラームが作動します。
対処方法:溶接ワイヤとワークピースの位置を調整し、溶接中に溶接ワイヤがワークピースに完全に接触するようにします。(ただし、ワークピースに近すぎると、ワークピースを貫通して溶接される可能性があるため、近すぎると溶接ワイヤがワークピースに接触する可能性があります。)
2. 不合理な溶接経路により、衝突によりガンヘッドが自動的に上昇する
解決策:溶接パスをリセットする
3. 溶接機のプラスとマイナスの配線の接触不良
処置方法:プラス線とマイナス線の配線状態を確認する
3. 溶接後のアーク終了が失敗する理由
1. アーク故障、信号検出エラー
理由: 溶接機がロボットからの信号を受信できなかったため、ロボットはアークを閉じることができませんでした。
アプローチ:
(1)設定パラメータが妥当かどうかを確認する
(2)IO信号を確認し、終端点Iの信号に異常がないか確認します。I点信号がONのままになっている場合は、
(3)回線に短絡がないか、アース線が異常に接続されていないか確認する
2. アーク発生後にアーク停止コマンドが設定されていない

理由: このアラームがティーチペンダントで発生した場合、円弧終了コマンドの追加を忘れていないか確認してください。
処理方法:プログラム内の円弧開始コマンドの後に円弧終了コマンドを追加する
本号では、主にYunhua溶接ロボットの溶接工程におけるアーク始動、アーク遮断、アーク終了に関連する問題について解説します。使用中にこれらの問題に遭遇した場合は、解決策をご参照ください。解決できない場合は、速やかにYunhuaの技術者にご相談ください。
Yunhua Robotのよくある問題と解決策をもっと知りたい場合は、Yunhua Robot公式アカウントに注目してください。
雲華溶接ロボットは、ガスシールド溶接、アルゴンアーク溶接、プラズマ切断、レーザー溶接といった多機能溶接を統合した自動ロボットです。高い柔軟性、強力な適応性、効率的な溶接効率、安定した溶接品質を備え、機械製造、自動車製造、精密電子機器、石炭採掘など、様々な分野で幅広く活用されています。
投稿日時: 2022年7月15日



